Pinar Onal
Bioinspired and Cost Effective Ankle Prosthesis
My Role
Designed, modeled, and built a functional robotic ankle prosthesis with microcontroller-based gait detection.
Project Type
I started as personal project due to my interest in wearable robotics. I self taught myself the prosthesis research and design considerations in ankle prosthetics. There are several version of design, this version also presented as my senior design project.
Impact
This project aimed to develop a low-cost robotic ankle prosthesis capable of replicating biomimetic gait trajectories. Conventional passive feet provide only limited motion and adaptability, while commercial powered prostheses remain prohibitively expensive. To bridge this gap, I created a microcontroller-driven, linearly actuated ankle that detects gait phases using force, IMU, and EMG sensors, offering dynamic control at a material cost below $150. Presented as a late-breaking result at ICRA 2023.
Technical Approach
Mechanical Design (Siemens NX)
System Integration (Actuator, Sensor EMG - IMU Integration, Ardunio)
Prototyping (3D Printing, Tooling)
Testing




Technical Approach
Mechanical Design:
Created all components (except the carbon foot) from scratch in Siemens NX, including a lead-screw actuator housing and a bioinspired ankle joint modeled after the talus-ligament structure to mimic inversion–eversion stability. Used eSUN Tough PLA for the prototype, ensuring strength and durability.
Control System:
Implemented a 3-state gait-phase controller that transitions between heel strike → midstance → push-off using real-time force, IMU, and EMG feedback. Each phase drives a corresponding trajectory segment based on gait modeling.
Testing & Validation:
Designed a wearable test setup to collect gait data. The prototype’s fastest full-cycle trajectory closely matched OpenSim ankle models at 0.4 m/s. Demonstrated basic toe and heel raise control using EMG and force sensors.
Background
While a passive foot prosthesis offers basic functionality, it lacks the dynamic adaptability to provide a biomimetic gait kinematics. This limitation results in a less natural gait and increased effort for the user. The high cost of microprocessor prostheses making these aids unaffordable for many who need them.
Objectives
Designing ankle-foot prosthesis.
Providing a biomimetic solution to enhance walking in uneven terrains.
Prototyping affordable and accessible electronic components.
Testing prototype measuring angle trajectory.
Comparing measured trajectory with gait model angle trajectory
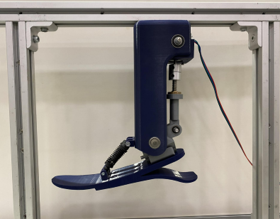
Design



In my design, I used lead screw directly connected to the motor with coupling. I designed a cylindrical housing for the lead screw nut to achieve linear motion. Except carbon-foot, I designed all the components from scratch using SiemensNX.
Human Ankle Inspired Joint Design

The inversion-eversion movement was an exciting aspect that I wanted to include. However, solving it with an active second degree of control increases the cost and challenges the control.

In my design, I inspired from talus bone structure and its connected ligament. I designed the angle of the connection that it can be only moved with force is applied from edge to ensure stable walking on flat surfaces. The design also includes a elastic support material (example: rigid polyurethane foam) between two connection parts, so that joint turns to inital position when the force is removed -as ligaments.






For printing material, eSUN Tough PLA Filament 1.75mm is used.
Assembly Gallery








Electronic Components

The total cost of the prosthesis is less than 150 US dollars including the printing material.
Control

The control focused on detecting three gait states with force, IMU, and EMG sensors. As heelstrike is recognized, the controller moves midstance. If pushoff is recognized, ankle trajectory completes the cycle, returning to heelstrike one. Each state has a predetermined angle trajectory section, as shown in the graph.
Test


To test the prosthesis, I designed a wearable setup that can be worn under the foot. The aim is to simulate similar data of prosthesis users through force, IMU, and EMG sensors. For the test, I wore the setup and walked slowly. During the test, it did not recognize the midstance pause from time to time.
Heel and Toe Raises
Here, I perform two staged toe raises and controlling the prosthesis using only force and EMG measurement.
ICRA 2023

Limitations
While the prototype was not in final wearable form for amputees, it proved the feasibility of a low-cost active prosthesis design. Future improvements will focus on increasing actuator speed and torque and enhancing the ligament-inspired joint for more natural multi-axis movement.